Ansys Speos|停车辅助摄像头仿真
简介
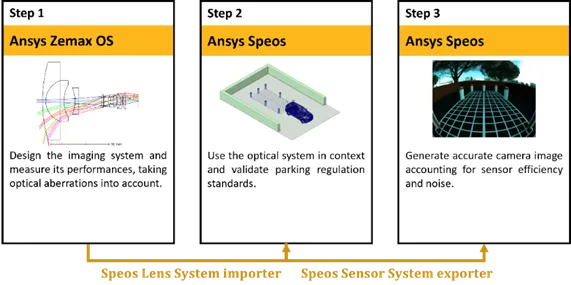
摄像头传感器广泛应用于汽车行业的各种用途,从道路和环境分析自动驾驶汽车应用,到驾驶员监控系统,停车辅助摄像头和电子后视镜监控系统等驾驶辅助应用,对于设计人员来说,利用能见度和总视野等指标来评估不同车辆条件下摄像头的性能是最重要的。在本文中,展示了辅助停车摄像头的简单集成仿真工作流。使用仿真的方式,设计人员可以很容易地检查停车辅助摄像头是否符合监管标准,如FMVSS 111。本文将使用Ansys Zemax OpticStudio来设计和导出摄像头光学系统,然后使用Ansys Speos来定位摄像头并检查FMVSS 111等停车规则标准,最后将使用Speos传感器SSS来生成最终的传感器图像。
镜头系统设计导出
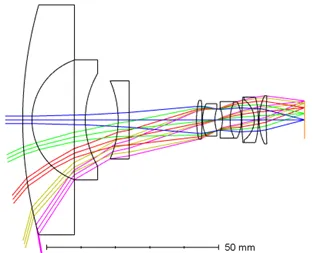
使用OpticStudio对摄像头的光学系统进行设计,镜头设计是一个广角光学系统,广角视野是停车辅助场景所必需的,整个视野是200度。
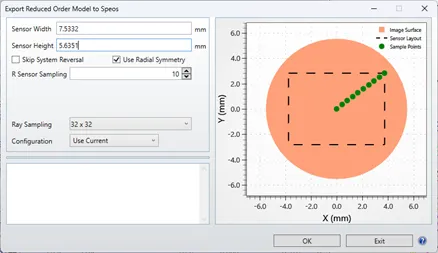
在OpticStudio中,使用“Export Reduced Order Model to Speos ”工具将当前系统的降阶模型(ROM)写入一个*.OPTDistortion的文件,Speos可读的该格式文件,文件包含传感器上的每个采样点输出的有关光线方向、起点、发射率、聚焦和距离的信息,由于系统输出降阶模型数据的行为是在样本值之间插值的,所以添加的样本点越多,模型的精度就越好。输出的*.OPTDistortion文件将在Speos中定义camera sensor传感器,计算到达光学传感器的光能量图。使用ROM代替完整的光学系统将更快得到Speos仿真的结果。此外,值得强调的是,由于镜头的几何形状和属性没有存储在ROM中,因此镜头系统供应商的知识产权IP可以得到保护。ROM中考虑的光学效应包括几何像差(畸变、场曲率)、色差、视场(FOV)、景深(DOF)等。
镜头系统集成
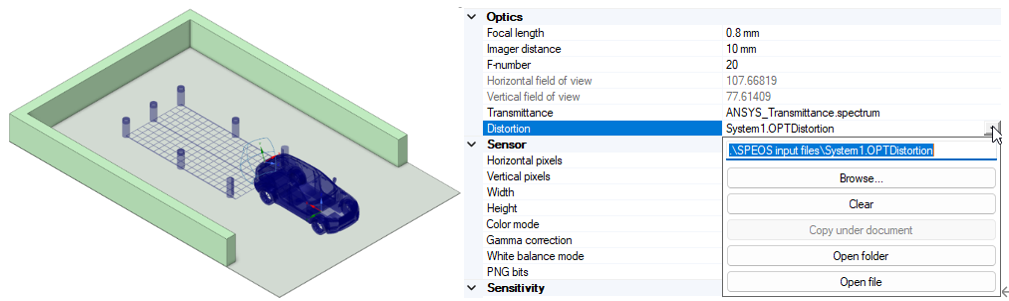
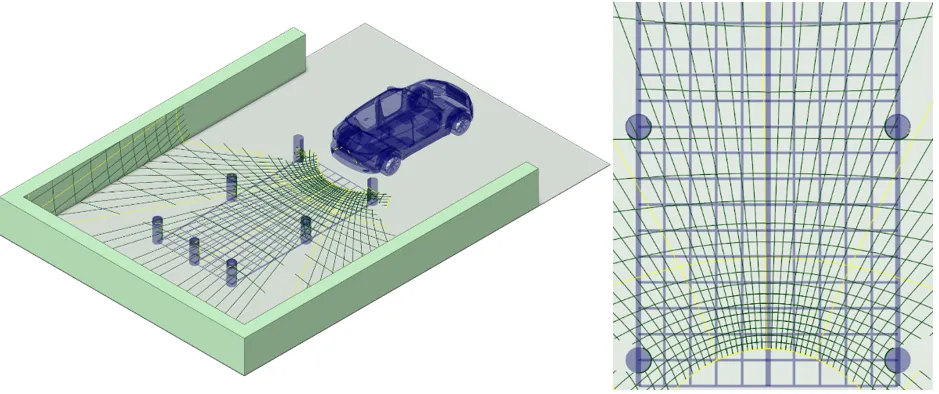
现在使用Ansys Speos将摄像头集成到停车环境中的车辆上。使用FMVSS111法规标准的停车场景,为了符合规则测试,汽车模型必须停在与场景几何图形的精确距离处,以评估停车辅助摄像头的视场。
分别设置Camera.Geometric几何类型摄像头,在交互式模拟中用于投影摄像头的视场,和Camera.Photomrtric光度摄像头,用于逆向模型生成曝光图,并且光度摄像头和几何摄像头都配备了OpticStudio设计的ROM降阶模型。
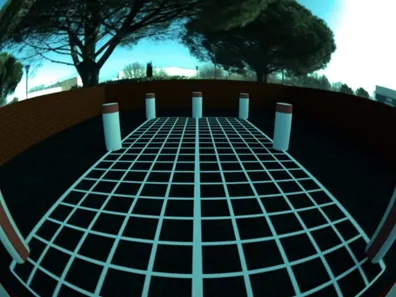
评估位于车辆后部的摄像头是否成功通过FMVSS 111标准,真正的测试是检查用户是否能从仪表板上看到障碍物,位于场景后面的5个障碍物必须完全可见,而前面的两个障碍物必须部分可见。Speos光学仿真结果与视场投影一致,可以清楚地看到前面的2个障碍以及后面的5个障碍,该光学系统满足FMVSS111标准视场要求。
生成传感器图像
使用最后的光度学模拟结果来生成摄像头产生的实际图像,可应用于仪表板上显示的图像。为此,使用Speos传感器系统SSS工具,这是一个后处理工具,可以将Speos的辐照度和曝光映射转换为原始映射,并使用光学传感器的降阶模型处理RGB图像。本文使用索尼IMX226 RGB CMOS传感器,该文件包含传感器线性表征的EMVA-1288标准数据,根据索尼技术文档中检索到的IMX226的技术信息创建。SSS可以处理模拟实际摄像头传感器如何将该信息转换为电子,并考虑可能影响图像质量的所有相关噪声,甚至可以生成电子图和噪声图,这对于了解传感器在各种照明条件下的性能至关重要。
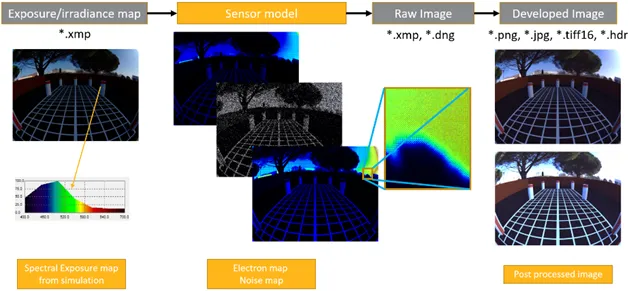
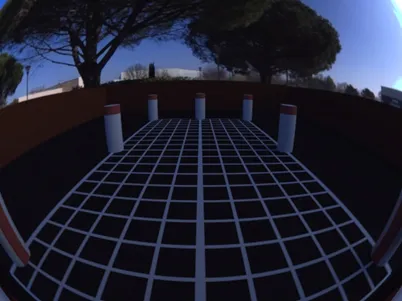
后处理完成后,可以在SSS文件夹中找到结果文件,包含传感器在进行任何处理之前捕获的所有Raw图数据,这些Raw数据是无价的,可以对传感器的属性有最清晰的了解,这个Raw图像也可以被开发成最终格式,可以根据需要用于不同的应用程序。以下是经过可视化、色彩准确性和整体美感优化的后处理的最终仪表板显示图像。
Speos还能够通过多频仿真,生成多真仿真结果,最终以视频方式呈现。以下视频以3倍增益拍摄,每帧积分时间为60毫秒,以每秒35帧的标准速率播放。这是驾驶员通过停车辅助摄像头看到的实时图像。图像清晰,动作流畅,表明该系统非常适合实时应用。
这个动画场景不仅验证了Speos传感器设置,还提供了停车辅助系统的操作体验。Speos的设计、仿真和实际应用的集成,已经为汽车行业的部署做好了充分的准备。