Ansys Speos | 智能手环心率传感器仿真
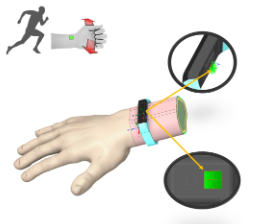
在本例中,我们将使用Ansys Speos和Ansys Motion模拟具有动态运动的智能带光学心率传感器。通过Ansys Motion模拟智能手环的位移和人体手腕组织的变形,然后将位移和变形数据导入Speos,最后在Ansys Speos中,用模拟智能手环位移和人体组织变形对智能手环心率传感器采集的光信号的影响。
概述
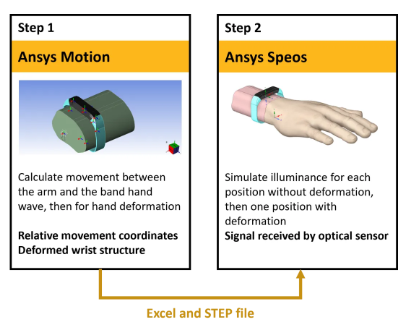
首先了解仿真流程和关键结果,整个流程会分为两个部分,Motion计算位移和手部变形,Speos计算不同位置和变形前后接收能量。仿真案例请在官网原文下载。
第一步,机械运动中的智能手环动态运动模拟(本文不涉及)
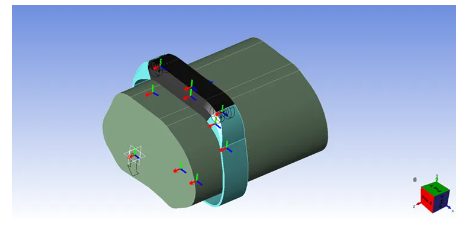
首先,本案例中只分析智能带移动对光信号的影响。详细的模拟内部运动将不包括在这个例子中。Ansys Motion是基于柔性多体动力学的先进工程解决方案。它可以在单个求解器内快速准确地分析刚体和柔体。在运动中,模拟了一个人类手臂摆动的场景。在手臂运动的过程中,智能手环会随之滑动,智能手环与人类手腕之间的相对位移将被输出到Speos。
第二步,在Speos中建立组织模型并进行模拟
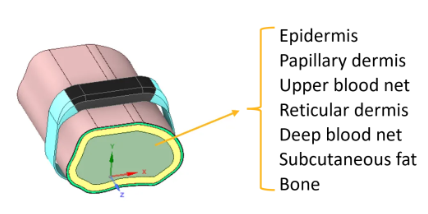
在Speos中使用光学参数构建手腕结构。根据以下文章Ansys Zemax | 如何建模人体皮肤以及光学心率探测器进行建模中描述的模型对组织进行建模,考虑了组织的折射、吸收和散射特性。
第三步,Speos批处理仿真与workbench
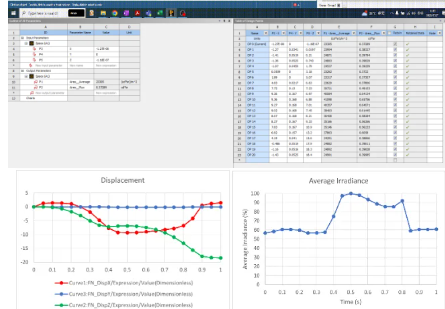
从Motion中导出智能手环与人手腕的相对位移。智能手环在X、Y、Z方向上随时间变化的位移分别保存在三个*. csv表中。利用Workbench建立了 DOE的设计。变量是智能腕带的位移,输出是智能腕带传感器接收到的辐照度,分析智能带移动对接收光信号的影响。
第四步,机械运动中的组织变形模拟(本文未涉及)
在这一步中,将模拟智能手环推向人体手腕组织时组织的变形。本文不涉及组织变形的详细模拟过程。Motion可以输出变形的模型,这里Speos选择导出每个变形组织层*.stl文件。
第五步,将变形后的组织结构导入Speos,启动仿真
将变形的组织模型导入Speos,然后将光学特性应用于相应的组织层。通过该仿真,可以分析组织变形对反向散射信号的影响,分析和比较在接收到的信号。
仿真流程
第一步,机械运动中的智能手环动态运动模拟(本文不涉及)
本例中只分析智能带移动对光信号的影响。详细的模拟内部运动过程将不包括在这个例子中。Ansys Motion是基于柔性多体动力学的先进工程解决方案。它可以在单个求解器内快速准确地分析刚体和柔体。本例模拟了一个人类手臂朝东方摆动的场景。在手臂运动的过程中,智能手环会随之滑动。智能手环与人类手腕之间的相对位移将被输出到Speos。为了简化问题,在智能手环位移仿真中,将人的手腕建模为刚体。在此步骤中忽略组织的变形。通过Motion仿真,可以导出智能手环的相对位移。在“**\Ansys SmartBand 23R1\Motion_displacement”中,可以找到“disx .csv”“DispY.csv”和“disz .csv”。这三个表分别包含了X、Y、Z三个方向的智能带位移数据随时间的变化。这些数据将作为Workbench DOE的设计点。
第二步,在Speos中建立组织模型并进行模拟。
1.打开Ansys SmartBand 23R1.scdocx
2.直接运行direct.1模拟。
3.打开Direct.1.Irradiance.xmp
4.打开测量工具,然后最大化测量区域。
5.单击文件,然后选择导出模板以导出度量模板,Direct.1.Irradiance.xml。
在第二步Speos中使用光学参数构建手腕结构,需要准备智能手环和人体手腕模型,并在Ansys Speos中设置光学模拟。人类手腕的生物结构和每个生物层的光学特性都是根据Zemax知识库文章中介绍的建立的。LED光源可以建模为朗伯表面光源。为了简化分析,将其输出功率归一化为1w。光谱以525纳米为中心,这是心率监测仪最常用的波长。将光学传感器简化为辐照度传感器。
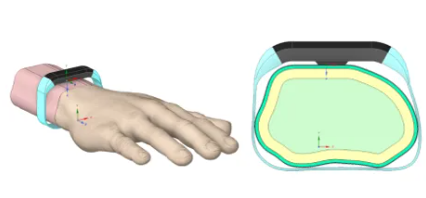
打开文件后,用户可以看到构建好的人体手腕和智能手环的3D模型,确定了腕部的层状结构及其光学性质,用户可以得到如下光学仿真结果:
第三步,Speos批处理仿真与Workbench
要使用Workbench进行批处理仿真,首先在Speos中创建输入变量。如上所述,运动仿真的输出是智能手环在X、Y、Z三个方向上的相对运动。因此,需要在Speos中定义相应的参数。
1.创建三个脚本参数X、Y和z,这些参数被定义为相应方向上的相对移动参数(如下所示)。
2.创建Script,右键单击创建的组(例如Group1),并选择edit script。然后单击脚本窗口内的记录按钮。
3.选择Design选项卡下的Move功能。在结构树中选择“Smart Watch”组件。记录必要代码的过程如下图所示。
4.在完成上述步骤后,已经可以在 Workbench中准备好DOE的输入输出参数。
5.打开Ansys SmartBand 23R1.wbpj然后双击参数设置。
6.分别输入X、Y、Z方向的相对位移数据。
7.单击更新所有设计点按钮,每个设计点的仿真结果将自动计算。

在上面的GIF中,移动控制手柄位于亮度传感器的轴上,这一步是不必要的,因为从运动导出的数据是相对位移而不是全局坐标,因此控制可以附加在任何首选位置。记录完移动命令后,将X、Y、Z参数添加到目标坐标命令行中,这样就可以控制智能手环的位置,如下图所示。参数和脚本已包含在案例中。
第四步,在Ansys Motion中进行组织变形模拟
模拟组织变形的过程超出了本文的讨论范围。但是需要提到的是,在Motion中选择的是2D模拟,而不是全3D变形模拟。正如我们在上一步中介绍的,所有包含血液的层都需要模拟以获得令人信服的结果。但复杂的层状结构会大大增加计算负荷。为了加快计算速度,只考虑XY平面上的变形。假设Z方向的变形是恒定的。在二维模拟中,智能手环被推入手腕0.92mm,可以在\deformation\2D_Result下找到变形的层模型。

第五步,将变形后的组织结构导入Speos,启动仿真
将二维变形图层导入Speos,在Z方向上拉二维面来重建三维结构,可以在 “\deformation \deformation.scdocx”中找到重建的三维模型。
1.打开deformation.scdocx
2.运行Direct.1仿真
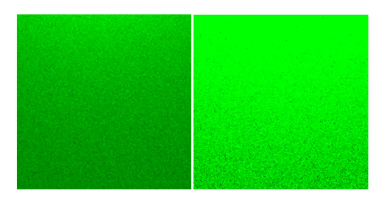
下图是将智能手环推向手腕前后,传感器接收到的信号对比(左图:无变形,右图:有变形)。总通量为0.36 lm(左图),1.83 lm(右图)。仿真结果符合物理现实,当收紧智能带时,其PPG传感器有信号接收增强。
模型设置参考参数
在Workbench中导出和设置运动数据
在演示案例中,设计点是每秒的相对运动。需要注意的是, Motion和Speos中位移方向的定义是相反的。因此,Workbench中的数据代表了Motion输出的逆值。“Y”方向表示垂直运动。在智能手环运动的运动仿真中,将人体组织和智能手环简化为刚体,垂直位移应始终为正(否则意味着智能手环模型穿透)
由于模拟精度的原因,偶尔会出现较小的负值,在本案例中通常小于1E-4的数量级。在实验设计的设置过程中,这些小的负值被忽略并用零代替。