Ansys Speos | 视觉仿真参数最佳实践
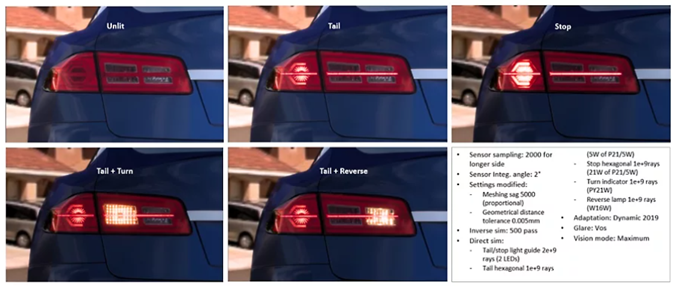
在本文中我们将给大家分享一些如何最大化Ansys Speos仿真软件仿真准确性的建议。通过调整参数以最适合仿真的应用领域,为设计创造更合适的仿真条件。本文将探索参数的变化,以最大限度地提高模拟结果的感知,以外部汽车照明为例子,解释在Ansys Speos中仿真尾灯模型的参数条件。
影响仿真质量和速度的因素是什么?
完美传感器设置可以极大地改变模拟结果,如果原始模型已经是一个物理上精确、高保真度的模型,在模拟仿真中请充分利用模型所提供的一切。可以想象,如果在4K显示器上观看1080像素分辨率的结果,将会有明显的像素化和缺乏清晰度。如果不想要一个快速、低保真的图像,那就不要降低结果的分辨率,以免失去图像显示质量。
所以,Sampling是Speos仿真中要注意的主要参数,更高的采样意味着更平滑,更漂亮的结果,但确实需要更长的模拟时间。例如,如果将X和Y采样加倍,则需要四倍的模拟时间才能得到结果。

Sampling小建议
1、“平滑”的结果是传感器较长的一侧至少有1920像素(即采样)。
2、对于单方形像素,传感器短边的分辨率应该与长边相同。
3、如果结果需要被放大使用,则采样应该在4,000像素左右,在放大条件下结果能够保持平滑。
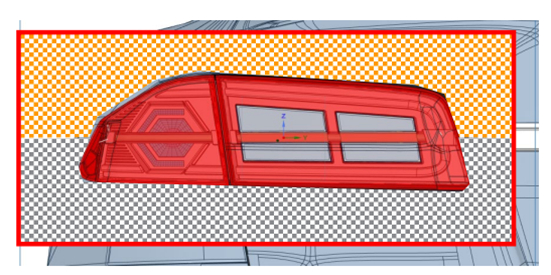
4、在亮度传感器的情况下,建议将亮度平面尽可能靠近物体(灯),并使用可能远的眼点,以实现较大的focal焦距。
设置增强模拟的网格质量?
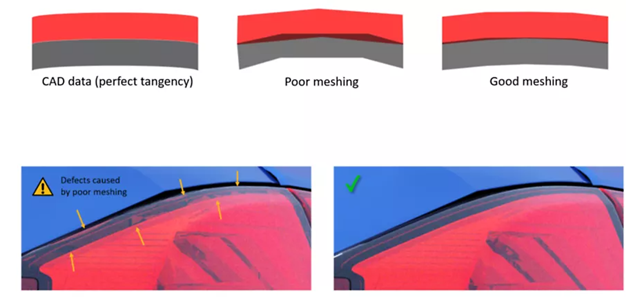
在物理组装中,所有部件都是物理连接,有一定程度的切线。根据定义的网格设置对用于Speos仿真的CAD设计数据进行细分,使CAD模型的原始精度发生变化。精细的网格对于减少由体积冲突或间隙引起的伪影至关重要。
有一些特定的选项设置和参数可以帮助设计人员充分利用模拟。默认参数在一些模型的仿真中已经表现的很好,但如果在模拟过程中有较大的error误差(即超过10%),则应该更改几何公差,也就是Speos中的GDT参数。

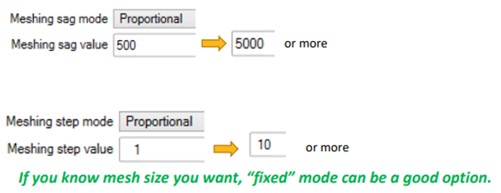
高的误差率在微型几何形状模拟仿真中最常见,如果运行模拟,仍然得到很大的误差率或意想不到的间隙,可以调整网格Sag值和/或网格Step值,优化网格。
当使用需要多次反射的光导或扩散材料时,通过将表面相互作用的最大数量增加到1,000甚至更高。

Direct simulation还是Inverse simulation?
因为它们都有各自的优点,所以可以同时运行直接模拟和逆向模拟。
当试图评估一盏灯的点亮外观时,传感器通常位于许多光线通过的位置。在这些条件下,直接模拟是一种更快的方法来收集光线,并获得较少噪声的结果。直接模拟也很有利,因为可以在一次模拟中使用多个传感器,而不会增加模拟时间。
在逆向模拟中不是这样,因为逆向模拟时间是需要乘以传感器的数量。在每个通道中,逆向模拟在传感器的焦点和每个像素之间产生光线。如果传感器覆盖了灯外的大片区域,许多光线将不会对点亮的外观产生影响。

在传感器很小且覆盖车灯的区域的情况下,逆向模拟可以像直接模拟一样有效。
直接模拟的最有利设置
1. Gathering
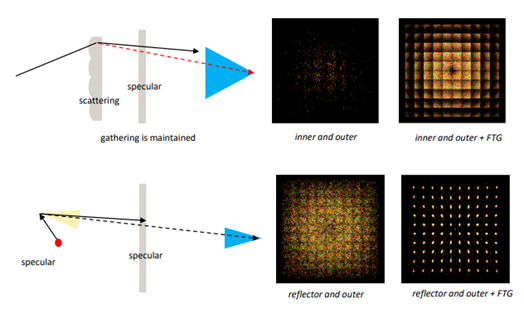
Gathering通过启用传感器采集和提高亮度或亮度传感器的收敛速率来改善模拟性能。Gathering是一个专用参数,不可编辑,但它始终处于活动状态。收集适用于散射(扩散)表面。

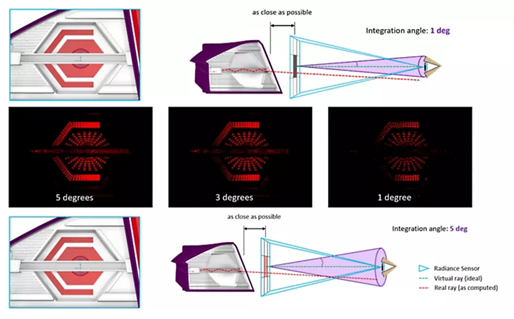
2. Integration Angle 积分角度(仅限直接仿真)
Gathering不能提供和镜面反射相同的效果,所以建议使用积分锥作为近似。如果光线朝向焦点的角度偏差(“虚射线”)小于积分角,则认定光线到达焦点。如果积分角太大,光线会聚得更快,但结果模糊。如果积分角过小,则光线收敛速度较慢,但结果较准确。对于大多数汽车照明应用来说,2度的积分角度是一个很好的值。
3. 快速传输采集(FTG)
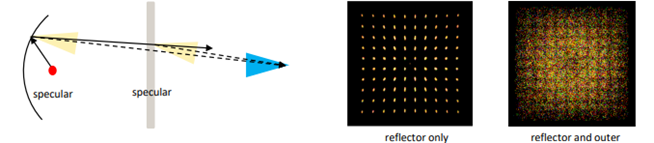
汽车灯一个外透镜具有镜面特性,因此它能够在作用处取消光线聚集,并且使用积分锥计算光线。
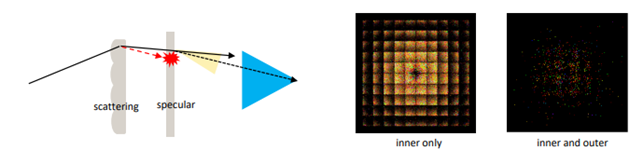
像反射件这样的光学元件也具有镜面光学特性。如果在设计中有一个外透镜,积分锥在外透镜处计算,结果通常是模糊的。这可以通过减小积分角度来弥补;但是,如果不使用FTG,模拟将花费更长的时间。
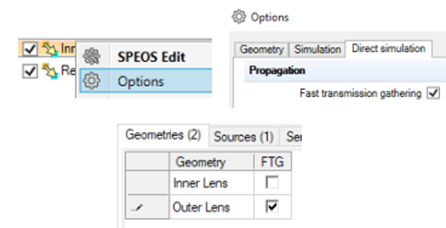
为了保持Gathering和积分角度,启用FTG。FTG允许光线忽略外部透镜上的折射。只要外透镜由厚度一致的平行表面构成,忽略折射对精度的影响就很小。透镜上的反射和吸收仍在考虑之中。
运行多长时间的模拟?
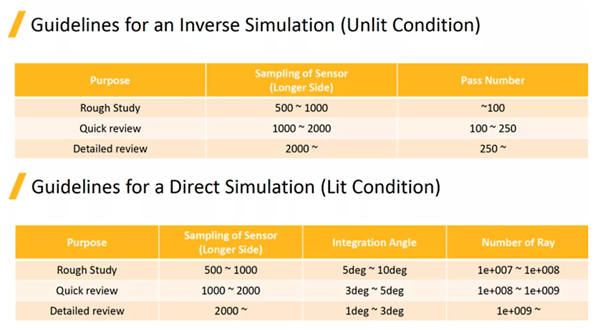
在下面的图中,将找到逆向和直接模拟的时间指导原则。在直接模拟的情况下,光线是定义模拟可以运行多长时间度量;光线越多,模型的保真度就越高。主要有,粗略的审查结果(例如,在设计迭代期间)、快速的审查结果(例如,在半主要的里程碑之后)和详细的审查结果(例如,在设计验证阶段)提供指导。这些结果将激发对设计满足需求和质量标准的能力的信心。
如何充分利用模拟结果?
建议对每个功能(即,尾部,刹车灯,转向灯,倒车灯等)运行单独的模拟,然后使用光度计算功能联合操作将结果统一。

这种方法还可以在修改结果时节省时间。不需要重新运行合并模拟,因此只需用新的单项结果替换旧的单项结果。
请记住,光线是根据光源通量的比率分布的,因此,如果仿真包含所有光源的单一模拟,则通量较小的光源接收到的光线比其他光源(例如,tail)少。但是通过独立模拟每个灯将单独的光源计算来避免这种情况。请参见下图中的输出示例。

虚拟人眼视觉实验室的后处理
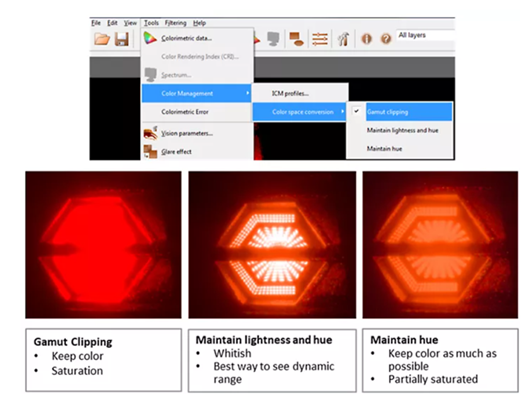
1. 颜色管理
颜色管理是重要的颜色设置,优化显示器上显示的色彩精度和饱和度。如下图所示,标准显示器可能只捕获光谱的一小部分。如果你的尾灯的红色超出显示器显示区域,那么图像结果看起来会比他们实际更饱和,原因是显示器缺乏准确显示结果的能力。
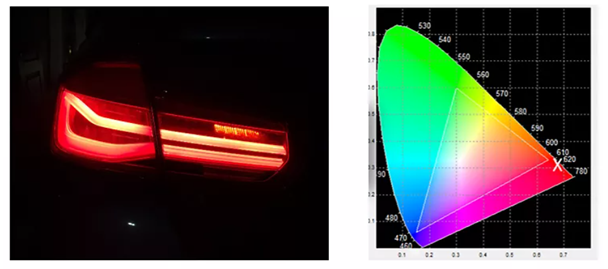
对于尾灯和刹车灯,建议选择保持亮度和色调(lightness and hue),因为相对较高的动态范围。请参见下图中Speos中所有三色空间转换选项的可视化表示。
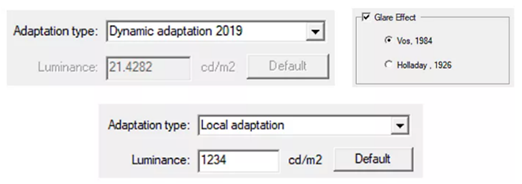
2. 动态适应
人眼必须适应环境的亮度水平。适应性考虑显示器的功能,并调整显示亮度值的梯度。目标是(a)适应特定的亮度值(即局部适应),或(b)模仿眼睛在扫描视觉不同区域时的空间适应。在Ansys Photometric Lab中亮度图的线性比例是不具有此功能。
当传感器具有宽视野(类似于我们的实际眼睛)时,动态适应2019类型设置是最佳实践,因此可以适当考虑整体亮度。当传感器视野较窄时,首选local局部自适应。这样,整体亮度可以手动设置,因为缩小的视野只包含真实眼睛所能看到的整体亮度的一小部分。
3. 眩光
Holladay,1926眩光效果设置提供了一个更快,更简单的计算;然而,考虑到今天的计算能力,1984年是推荐的设置。如果仿真模型有噪声(例如,高亮度像素),Vos, 1984可能会产生不希望的闪光效果。为了消除这种影响,即使它是一个低亮度的光,也应该仿真时加入一个环境光源。同时,增加光线的数量也有助于消除噪声。如果仿真的时间不够,结果不够消除噪声,可以用1926年的Holladay来真实地展示亮度。
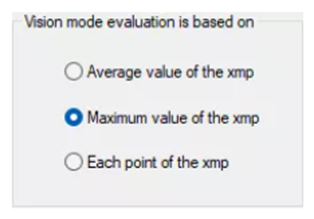
4. 视觉模式评价
建议视觉模式评估是基于xmp的最大值。因为平均值可能较低,导致暗视,所以最大值用于夜间驾驶条件或其他低亮度情况是最好的选择。
仿真结果应该是什么样子?
通过遵循这里介绍的最佳实践,可以得到这些结果。